The Enterprise amusement park ride
As part of tutoring physics and maths to high school students, I sometimes write up deep-dive explanations of questions arising during lessons. Below I discuss the question of how fast an amusement park ride should rotate so that the passengers don’t fall out when the gondola is at its highest point.

Image credits: Wikipedia Commons.
Question
The Enterprise is a ride sometimes found at carnivals and amusement parks. It consists of a large wheel-like structure with gondolas attached to the wheel’s rim, like a Ferris wheel. The wheel initially starts in the horizontal (the plane of the wheel being parallel to the plane of the ground). After the wheel reaches a certain rotational speed, it rotates to the vertical (the plane of the wheel being perpendicular to the plane of the ground). This means that the gondolas at the top of the wheel are upside down (see, for instance, the image above).
Consider such an amusement ride with a diameter of 22m. Calculate both algebraically and numerically the minimum speed, \(v_\mathrm{min}\), that this ride must have so that a passenger in a gondola at the wheel’s highest point does not fall onto the gondola’s roof.
Answer
The force keeping the passengers on a circular path is the centripetal force. However, a passenger in a gondola experiences the feeling of being pushed outwards, away from the wheel’s hub, and into the floor of the gondola. The passengers experience the centrifugal force. This is a fictitious force experienced by objects within rotating systems and acts radially away from the axis of rotation (i.e. outwards, away from the wheel’s hub).
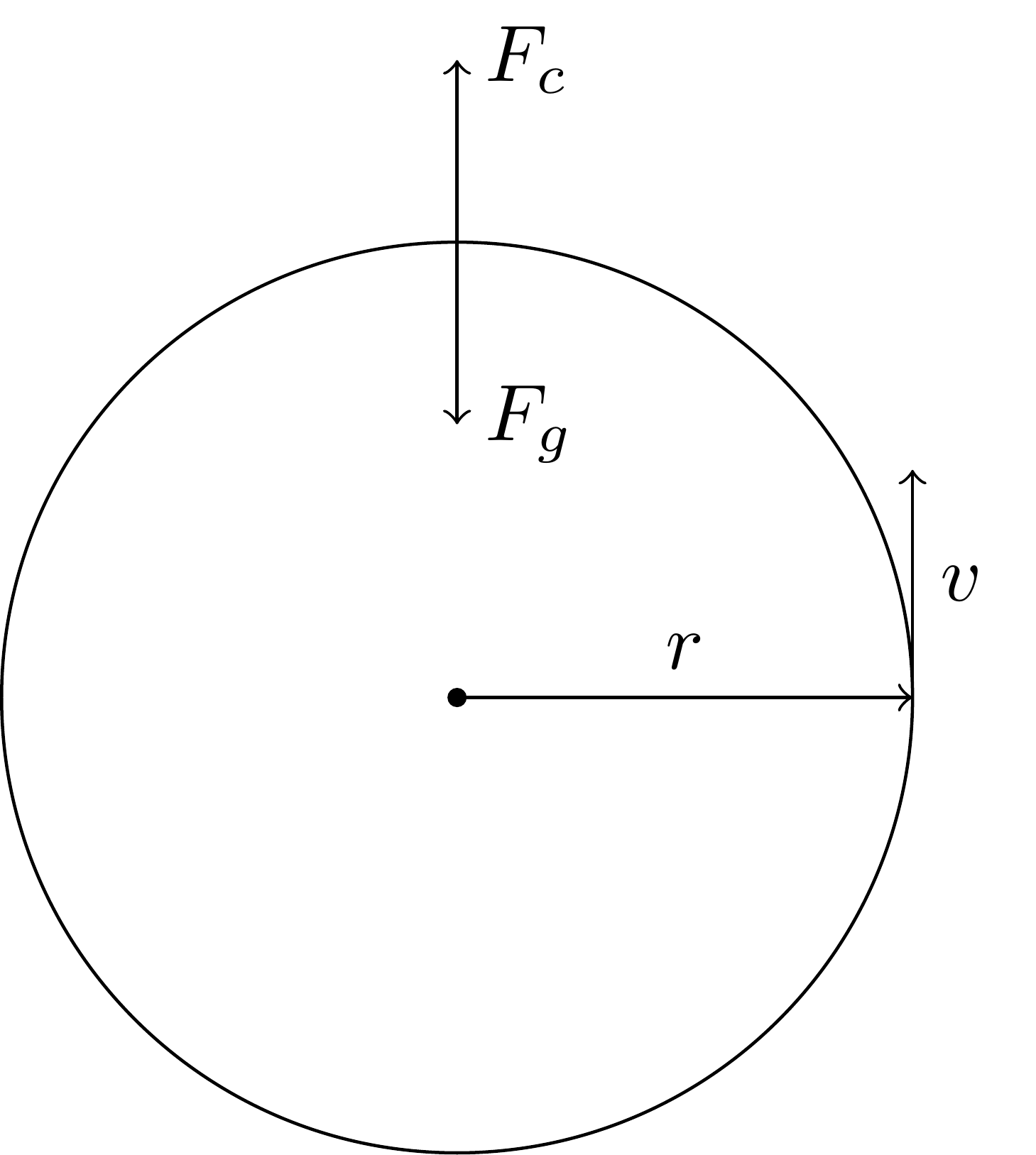
Since we wish to consider the experience of a passenger in one of the gondolas (i.e. in one of the rotating frames of reference), it is useful (and relevant) to consider the magnitude of the centrifugal force, which we will denote by \(F_c\). The passenger also experiences a force due to gravity (their weight) which is directed vertically downwards towards the earth; this force we denote by \(F_g\). When the magnitude of the centrifugal force is equal to the weight of the passenger then they will remain in their gondola at the wheel’s highest point and thus won’t fall onto the gondola’s roof. In other words, we need to find the speed \(v\) when \(F_c = F_g\).
The diagram below describes this situation.
We know that the centripetal force is
\[F_c = m a_c\]where \(m\) is the passenger’s mass and \(a_c\) is the centripetal acceleration. Note that we’ve re-used the symbol \(F_c\) because the centripetal force is equal in magnitude to the centrifugal force.
The centripetal acceleration is
\[a_c = \frac{v^2}{r}\]where \(v\) is the speed of the wheel’s rim and \(r\) is the wheel’s radius (see also the derivation of \(a_c\) below).
We now substitute the result for \(a_c\) into the equation for \(F_c\), which gives
\[F_c = m \frac{v^2}{r}\]for the centrifugal force experienced by the passenger.
The passenger has a weight due to gravity of
\[F_g = m g\]where \(g\) is the acceleration due to gravity and \(m\) is the passenger’s mass as before.
For the passenger to remain on the floor of the gondola at the wheel’s highest point, the centrifugal force must be at least equal to the passenger’s weight, i.e.
\[F_c = F_g\]Substituting the equation for the passenger’s weight as well as the equation for the centrifugal force in terms of the wheel’s velocity into the above equation we get
\[m \frac{v_\mathrm{min}^2}{r} = m g\]where we’ve called the wheel’s velocity \(v_\mathrm{min}\) because this equation represents the situation where the centrifugal force exactly balances the weight force. The force is not too big or too small and hence it’s the minimum velocity required for the passenger not to fall onto the gondola’s roof at the wheel’s highest point.
We can cancel the mass since it appears on both sides of the equation, giving
\[\frac{v_\mathrm{min}^2}{r} = g\]solving this for \(v_\mathrm{min}\) we get
\[v_\mathrm{min} = \sqrt{g r}\]We know that \(g = 9.81\ \mathrm{m/s^2}\) and that \(r = 11\ \mathrm{m}\) (the radius is half the diameter which is 22 m), we can calculate that
\[v_\mathrm{min} = \sqrt{9.81 \times 11} = 10.388\ \mathrm{m/s} = 37.397\ \mathrm{km/h}\]where we’ve used the fact that \(1\ \mathrm{m/s} = 3.6\ \mathrm{km/h}\).
Put another way, the speed of a gondola needs to be at least \(37.397\ \mathrm{km/h}\) for the passenger to remain safely seated in their gondola at its highest point.
Derivation of \(a_c\)
Where did the equation for \(a_c\) come from? There are two ways to explain this and Physics Ninja explains the calculation particularly well. I’m going to reproduce his explanations here.
Derivation via a geometric argument
A point on the wheel’s rim starts at an initial position denoted by the radius vector \(\mathbf{r}_i\) and with an initial velocity \(\mathbf{v}_i\). Remember, velocity is a vector, hence it has a direction, whereas speed is the magnitude of the velocity, i.e. \(|\mathbf{v}| = v\). After a time \(\Delta t\), this point on the wheel’s rim has moved to a final position denoted by the radius vector \(\mathbf{r}_f\), and now has a final velocity of \(\mathbf{v}_f\) (its speed is still \(v\)). The radius vector thus rotates in a time \(\Delta t\) through an angle \(\Delta \theta\).
The following diagram describes this situation:
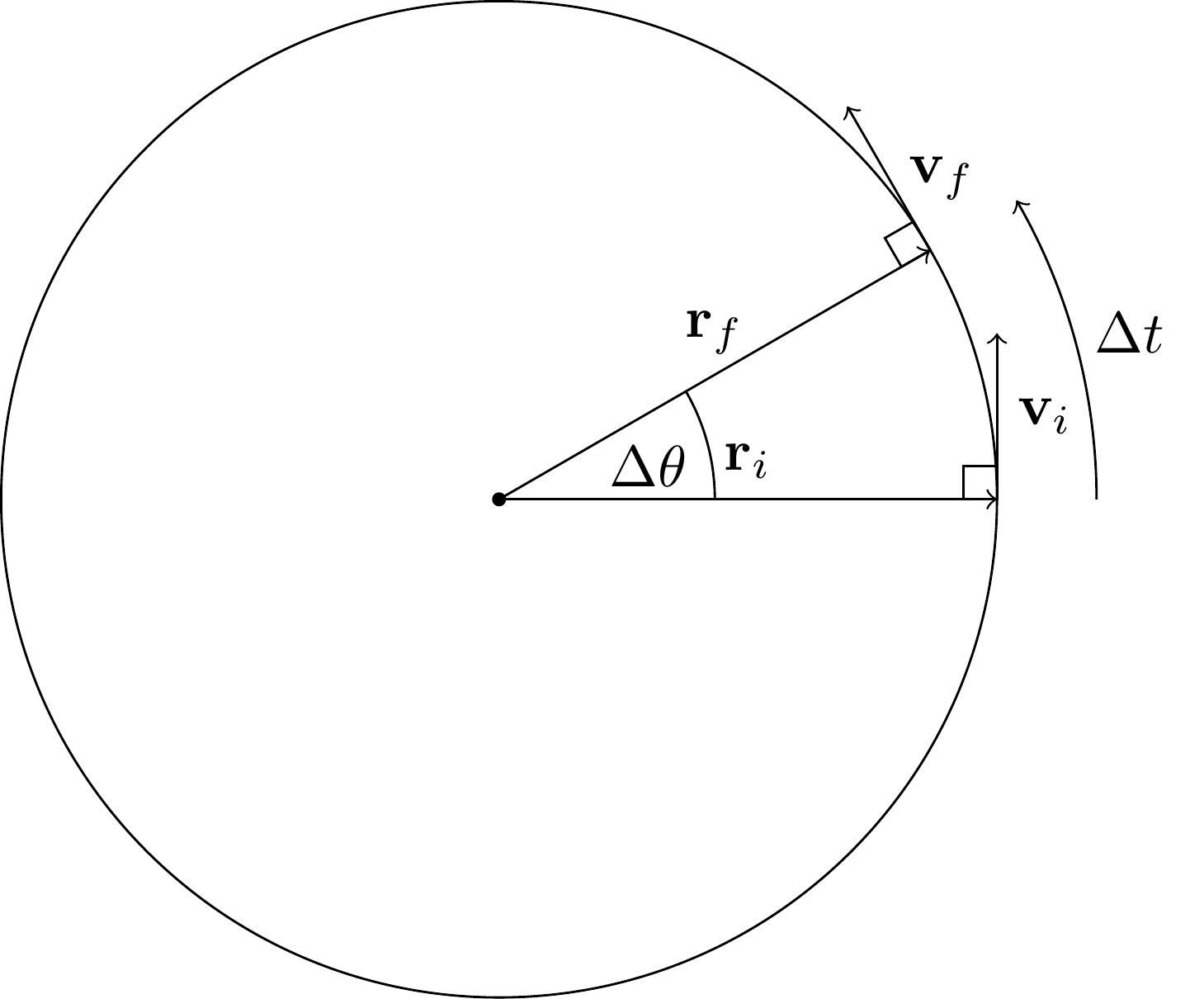
Note that the radius vector \(\mathbf{r}_i\) is perpendicular to its corresponding velocity vector \(\mathbf{v}_i\). Also, the radius vector \(\mathbf{r}_f\) is perpendicular to its corresponding velocity vector \(\mathbf{v}_f\).
If we draw the radius vectors with their bases starting from the same point, we see that there’s a vector from the tip of \(\mathbf{r}_i\) to \(\mathbf{r}_f\) which we’ll call \(\Delta \mathbf{r}\). These vectors form a triangle (see the diagram below).
Since the radius vector \(\mathbf{r}_i\) rotates to \(\mathbf{r}_f\), making a radius change of \(\Delta \mathbf{r}\) in a time \(\Delta t\), this gives us the velocity
\[\mathbf{v} = \frac{\Delta \mathbf{r}}{\Delta t}\]The magnitude of this velocity is the speed of a point on the wheel’s rim:
\[v = |\mathbf{v}| = \frac{|\Delta \mathbf{r}|}{\Delta t}\]where we only need to take the magnitude of \(\Delta \mathbf{r}\) because \(\Delta t\) is a scalar.
We can also draw a similar triangle for the velocity vectors. We join \(\mathbf{v}_i\) to \(\mathbf{v}_f\) at their bases and then note that there is a vector from the tip of \(\mathbf{v}_i\) to the tip of \(\mathbf{v}_f\). This is the change in the two vectors which we denote as \(\Delta \mathbf{v}\), forming a triangle.
The radius vector triangle and the velocity vector triangle look like this:
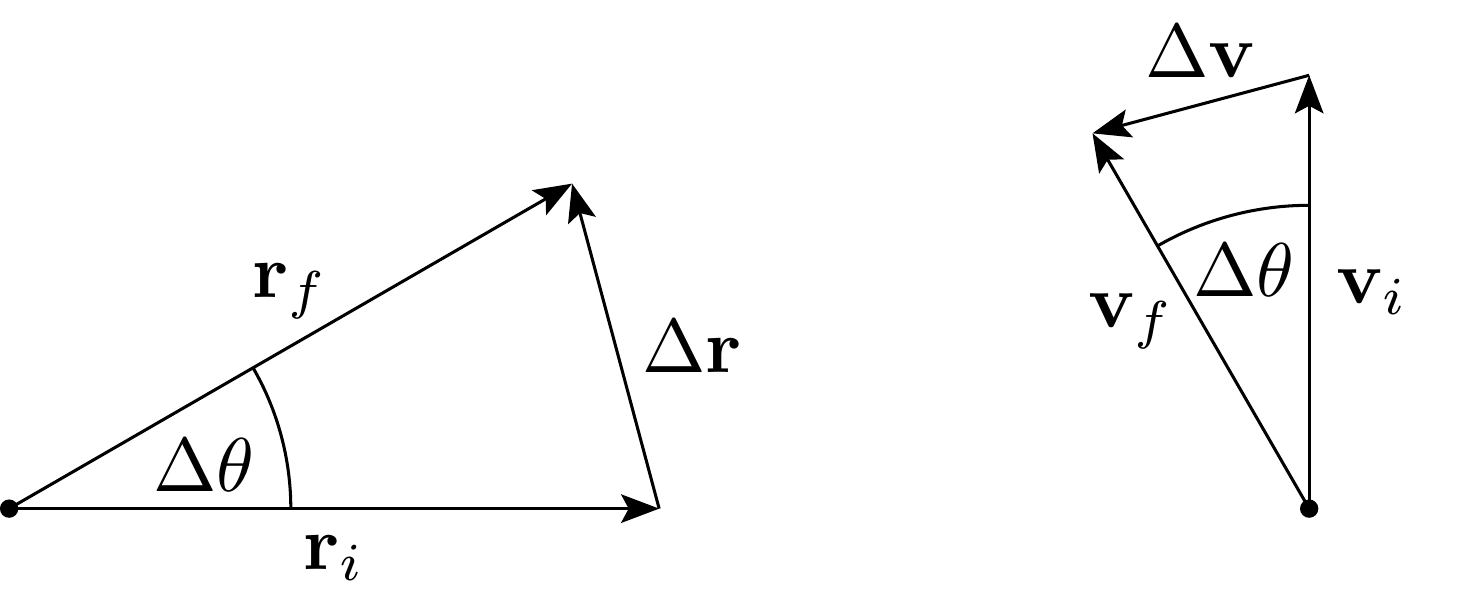
Because \(\mathbf{v}_i\) is perpendicular to \(\mathbf{r}_i\) and \(\mathbf{v}_f\) is perpendicular to \(\mathbf{r}_f\), we can see that the angle between \(\mathbf{r}_i\) and \(\mathbf{r}_f\), \(\Delta \theta\), is also the angle between \(\mathbf{v}_i\) and \(\mathbf{v}_f\). Hence the triangle for the velocity vectors is similar to the triangle for the radius vectors. Because these two triangles are similar (and isosceles), the ratio of the shortest side to one of the long sides for the radius vector triangle will be equal to the ratio of the shortest side to one of the long sides for the velocity vector triangle. In other words
\[\frac{|\Delta \mathbf{r}|}{|\mathbf{r}_i|} = \frac{|\Delta \mathbf{v}|}{|\mathbf{v}_i|}\]which can be slightly more simply written as
\[\frac{|\Delta \mathbf{r}|}{r} = \frac{|\Delta \mathbf{v}|}{v}\]because \(\vert\mathbf{r}_i\vert = r\) and \(\vert\mathbf{v}_i\vert = v\).
We can rearrange this equation for \(\vert\Delta \mathbf{v}\vert\) like so
\[|\Delta \mathbf{v}| = \frac{|\Delta \mathbf{r}| v}{r}\]We know that acceleration is the change in the velocity vector divided by the change in time
\[a = \frac{|\Delta \mathbf{v}|}{\Delta t}\]hence we can divide both sides of the equation for \(|\Delta \mathbf{v}|\) by \(\Delta t\) to obtain an equation for the acceleration:
\[a = \frac{|\Delta \mathbf{r}|}{\Delta t} \frac{v}{r}\]We also know that the speed \(v\) is the change in the radius vector divided by the change in time, i.e.
\[v = \frac{|\Delta \mathbf{r}|}{\Delta t}\]Substituting this into our equation for the acceleration, \(a\), we get
\[a = v \frac{v}{r} = \frac{v^2}{r}\]hence we obtain the equation for \(a_c\) mentioned earlier:
\[a_c = \frac{v^2}{r}\]Derivation using calculus
Let’s now consider the situation of a point on the wheel’s rim denoted by the radius vector \(\mathbf{r}\) as described by the following diagram.
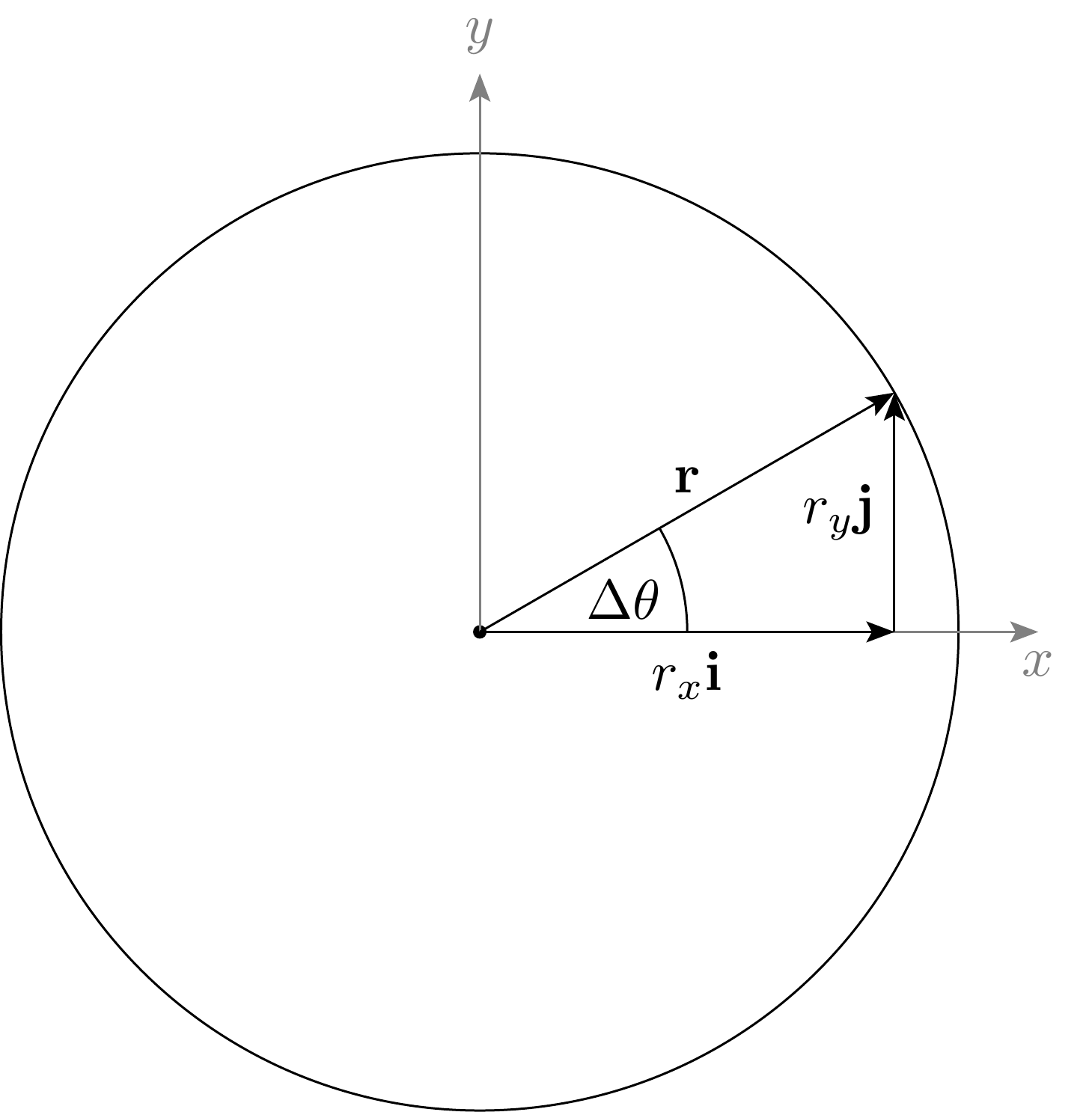
The radius vector \(\mathbf{r}\) can be split up into its \(x\) and \(y\) components like so:
\[\mathbf{r} = r_x \mathbf{i} + r_y \mathbf{j}\]where \(r_x\) is the length of the radius vector along the \(x\) axis, \(\mathbf{i}\) is the unit vector pointing in the \(x\) direction, \(r_y\) is the magnitude of the radius vector along the \(y\) axis, and \(\mathbf{j}\) is the unit vector pointing in the \(y\) direction.
Let’s denote the angle of the radius vector to the \(x\) axis by the variable \(\theta\). We can therefore rewrite the above equation as:
\[\mathbf{r} = r \cos \theta \mathbf{i} + r \sin \theta \mathbf{j}\]where \(r\) is the radius of the wheel and the magnitude of the radius vector.
We know that the wheel is rotating at a constant speed, hence the radius vector will rotate through a constant angle \(\theta\) within a given time \(t\). Thus we can write the angular velocity of the wheel like so:
\[\omega = \frac{\theta}{t}\]Rearranging this equation for \(\theta\) we have
\[\theta = \omega t\]Substituting this into our equation for \(\mathbf{r}\), we have
\[\mathbf{r} = r \cos (\omega t) \mathbf{i} + r \sin (\omega t) \mathbf{j}\]We know that velocity is the time derivative of displacement, hence we can find the velocity vector by differentiating the equation for the radius vector
\[\mathbf{v} = \frac{d \mathbf{r}}{d t} = -r \omega \sin (\omega t) \mathbf{i} + r \omega \cos (\omega t) \mathbf{j}\]To get this result, we’ve used the property that
\[\frac{d}{d \theta} \sin \theta = \cos \theta\]and
\[\frac{d}{d \theta} \cos \theta = -\sin \theta\]as well as the chain rule.
We can arrive at the acceleration similarly, by differentiating the velocity with respect to time:
\[\mathbf{a} = \frac{d \mathbf{v}}{d t} = -r \omega^2 \cos (\omega t) \mathbf{i} + r \omega^2 \sin (\omega t) \mathbf{j}\]This is our centripetal acceleration.
However, we’re only interested in the magnitude of this vector, \(|\mathbf{a}|\), which is the square root of the sum of the squares of its components, i.e.
\[a_c = |\mathbf{a}| = \sqrt{r^2 \omega^4 \cos^2 (\omega t) + r^2 \omega^4 \sin^2 (\omega t)}\]We can extract the common factor of \(r^2 \omega^4\) out of the square root to give
\[a_c = r \omega^2 \sqrt{\cos^2 (\omega t) + \sin^2 (\omega t)}\]We know from the trigonometric identity that
\[\cos^2 \theta + \sin^2 \theta = 1\]hence the expression under the square root is equal to 1, i.e.:
\[\cos^2 (\omega t) + \sin^2 (\omega t) = 1\]which means we can simplify our equation for \(a_c\) further to
\[a_c = r \omega^2\]We can write the angular velocity in terms of the tangential velocity like so:
\[\omega = \frac{v}{r}\]Substituting this value into the above expression for \(a_c\) we get
\[a_c = r \frac{v^2}{r^2} = \frac{v^2}{r}\]which is the result we got by using the geometric argument above.
Support
If you liked this post and want to see more like this, please buy me a coffee!